Perception and Localization
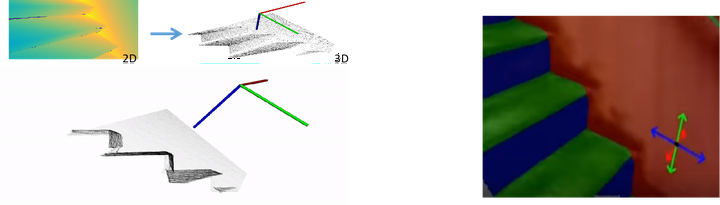
In my bachelor thesis, a modified approach is presented to estimate the three Degree-of-Freedom (DoF) orientation of a RGB-D camera in indoor environments. An estimator is derived from 3D point clouds and utilizes the RANSAC algorithm und surface normal vectors to detect planes in the Manhattan World. This visual compass works in the indoor man-made scenes and could reach the capability of being real-time in CPU. Moreover, the possibility of combining the information from Inertial Measurement Unit (IMU) is also covered, which serves as a pre-development for sensor fusion.
#C++ & Matlab #PCL & OpenCV #depth camera & pose estimation